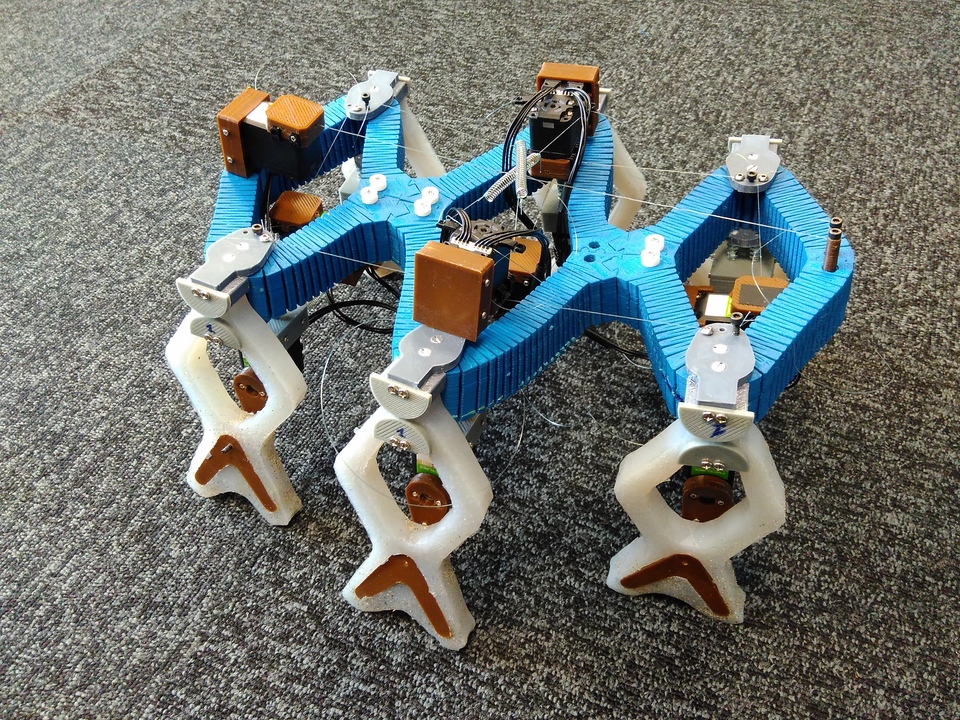
6-legged Robot
Presentation
Brief description :
This robot has 6 legs actuated independently by 6 motors, which allows it to have various kind of movements.
presentation video of the simulation showing it in action:
video of the realisation based on the previous simulation:
Why reduce it :
To show that we can easily reduce parts of a soft robot and re-use it in the full robot. Here we only reduce the leg of our robot not its core.
Reduction Parameters
To make a reduced model of one leg of this robot, we had to create a new special function to explore its workspace. To create the rotation mouvement we see on the different previous videos we rotate a point that will be followed by the model creating the rotation.
:meth:mor.animation.doingCircle how it was implemented
We have only one actuator here, so our listObjToAnimate contains only one object:
ObjToAnimate("actuator","doingCircle",'MechanicalObject',incr=0.05,incrPeriod=3,rangeOfAction=6.4,dataToWorkOn="position",angle=0,rodRadius=0.7)
With these different parameters we will after perform the reduction like explained here
Results
With coarse mesh
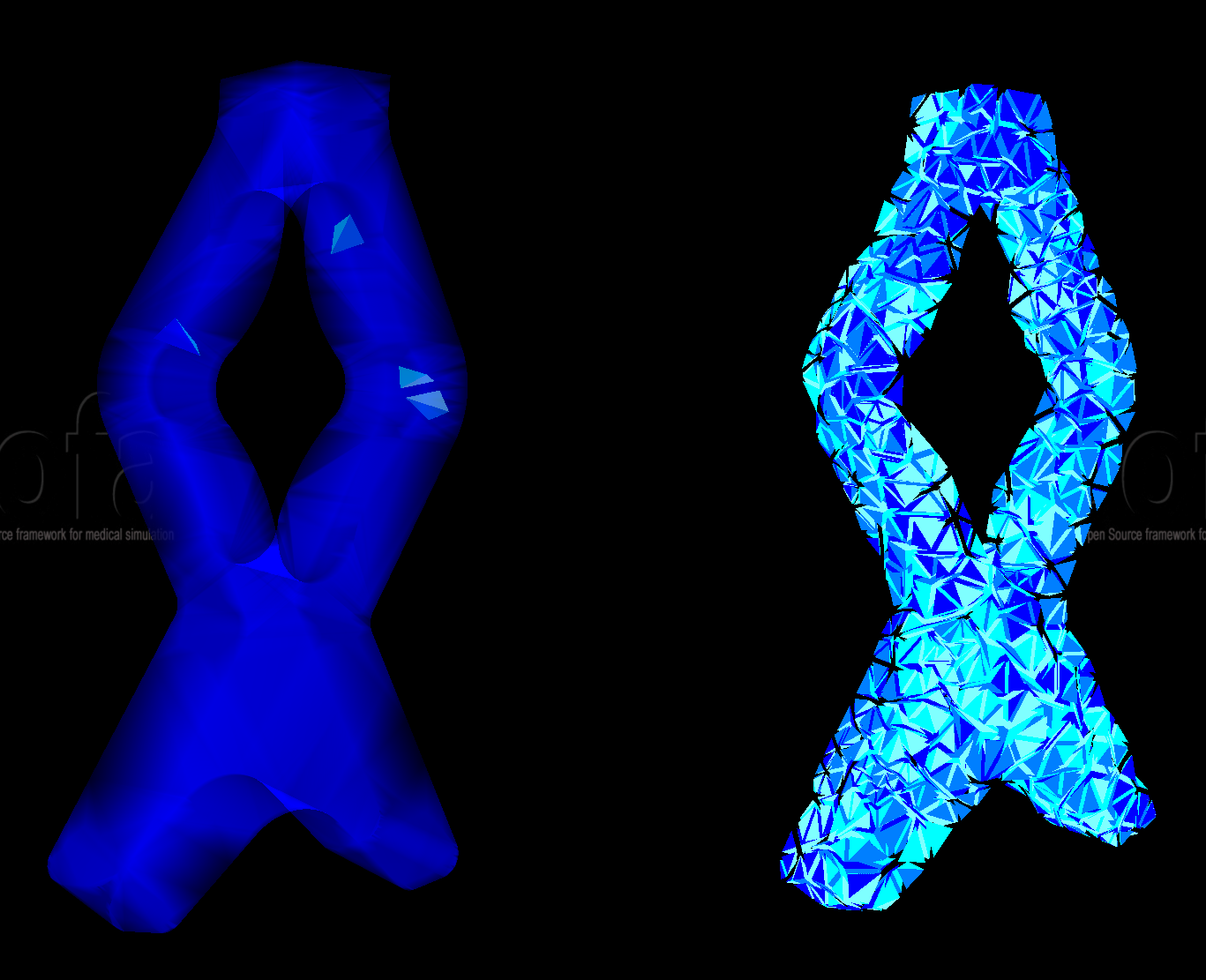
not reduced |
reduced |
|---|---|
90 |
300 |
With fine mesh
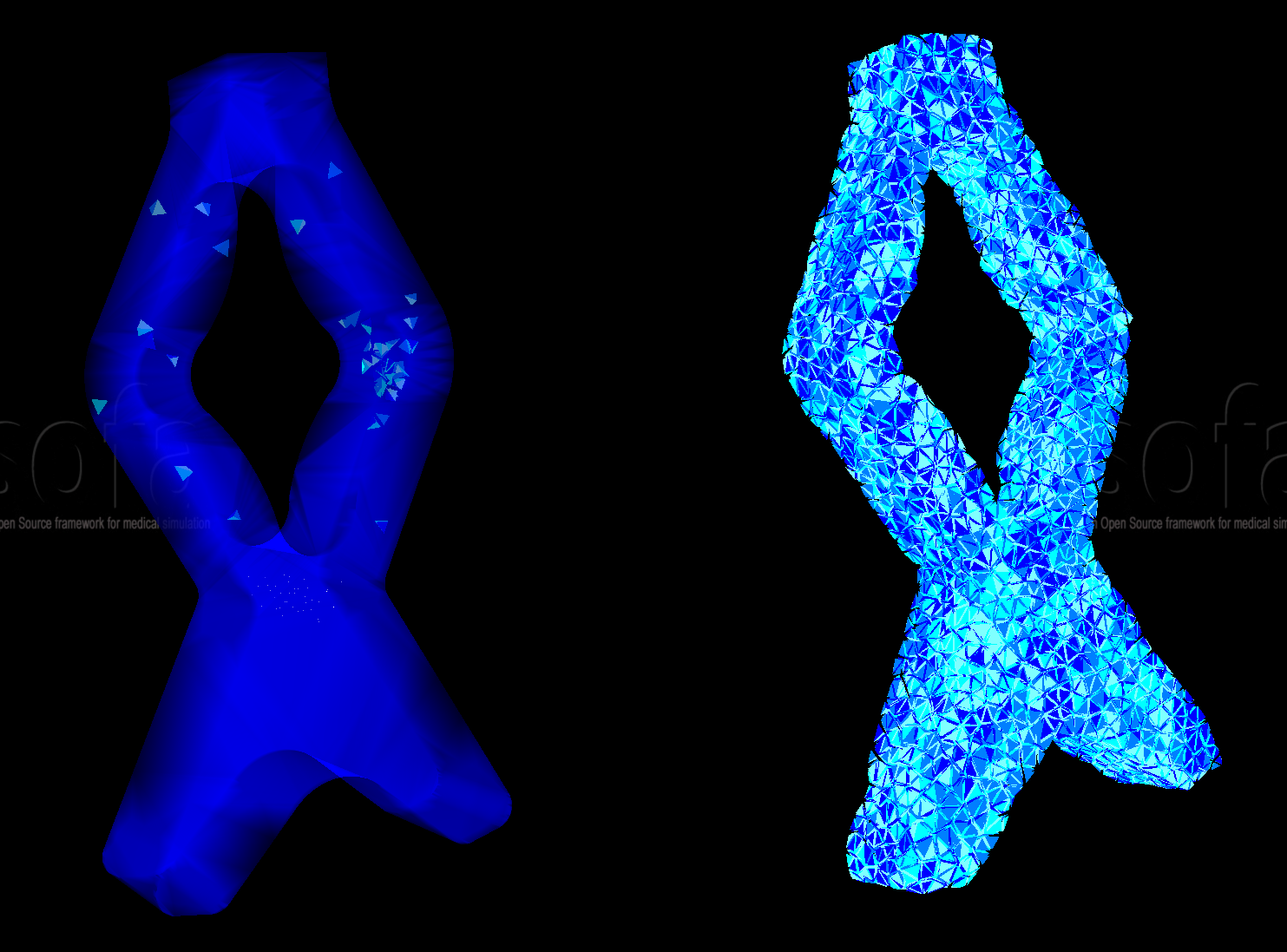
not reduced |
reduced |
|---|---|
3.8 |
190 |